Product Description
Product Description
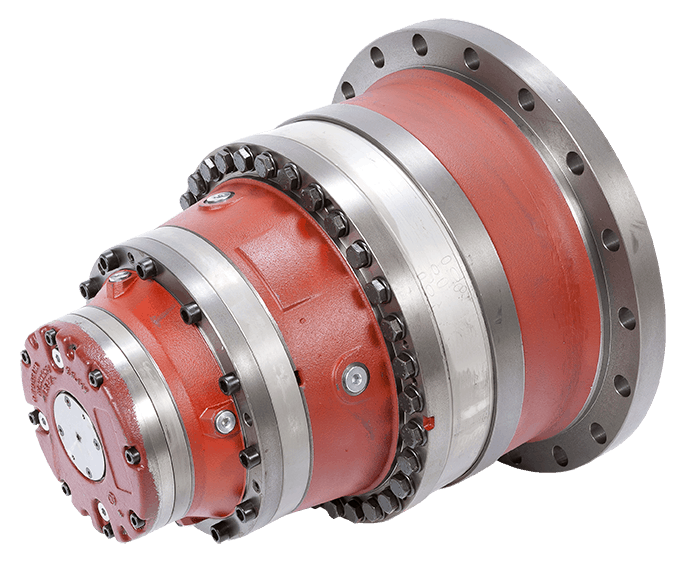
The HMHG-II-E series harmonic reducer has a compact machine structure where the input shaft is connected to the inner hole of the wave generator through an integral cam. It can be used with either a rigid wheel end fixed or flexible wheel end output connection mode. Currently available in production specifications ranging from 14 to 40, this series finds its main applications in aerospace, robotics, semiconductors, power inspection, and automation equipment.
Principle of harmonic gear transmission
The harmonic gear drive was invented by the American inventor C.W.Musser in 1955. It is a new transmission mode using the elastic deformation of flexible working components to carry out movement or power transmission. It breaks through the mode of mechanical transmission using rigid components and uses a flexible component to achieve mechanical transmission. Thus, a series of special functions that are difficult to achieve with other drives are obtained. Because the deformation process of the intermediate flexible component is basically a symmetrical harmonic, it is named. In addition to the Soviet Union called this transmission waveform drive or flexible wheel drive, the United States, Britain, Germany, Japan and other countries are called “harmonic drive”.
Harmonic deceleration principle
The deceleration principle of harmonic gear transmission refers to the use of the relative motion of the flexwheel, rigid wheel and wave generator, mainly the controllable elastic deformation of the flexwheel to achieve motion and power transmission. The elliptic CAM in the wave generator rotates in the flexwheel so that the flexwheel deforms. When the flexwheel teeth and rigid wheel teeth at both ends of the long axis of the elliptic CAM of the wave generator are engaged, the flexwheel teeth at both ends of the short axis are detached from the rigid wheel teeth. The teeth between the long axis and the short axis of the wave generator are in a semi-meshing state that gradually enters the snapping along different sections of the perimeter of the flexwheel and the rigid wheel, which is called the snapping; In a semi-meshing state that gradually withdraws from engagement, it is called snapping out. When the wave generator continuously rotates, the flexwheel constantly deforms, so that the 2 wheel teeth in the biting, meshing, biting out and disengaging 4 kinds of motion constantly change their original working state, resulting in the wrong tooth movement, to achieve the active wave generator to the flexwheel movement transmission.
Product Parameters
| Model | Reduction ratio | Rated torque at input 2000r/min | Permissible CHINAMFG torque at start/ stop | Permissible max.value of ave.load torque | instantaneous permissible max. torque | Permissibie max.input rotational speed | Permissible ave.input rotational speed | Backlash(arc sec) | Transmission accuracy(arc sec) |
| Nm | Nm | Nm | Nm | r/min | r/min | ≤ | ≤ | ||
| 14 | 50 | 7 | 23 | 9 | 46 | 8000 | 3500 | 20 | 90 |
| 80 | 10 | 30 | 14 | 51 | 20 | 90 | |||
| 100 | 10 | 36 | 14 | 70 | 10 | 90 | |||
| 17 | 50 | 21 | 44 | 34 | 91 | 7000 | 3500 | 20 | 90 |
| 80 | 29 | 56 | 35 | 113 | 20 | 90 | |||
| 100 | 31 | 70 | 51 | 143 | 10 | 90 | |||
| 20 | 50 | 33 | 73 | 44 | 127 | 6000 | 3500 | 20 | 60 |
| 80 | 44 | 96 | 61 | 165 | 20 | 60 | |||
| 100 | 52 | 107 | 64 | 191 | 10 | 60 | |||
| 120 | 52 | 113 | 64 | 161 | 10 | 60 | |||
| 25 | 50 | 51 | 127 | 72 | 242 | 5500 | 3500 | 20 | 60 |
| 80 | 82 | 178 | 113 | 332 | 20 | 60 | |||
| 100 | 87 | 204 | 140 | 369 | 10 | 60 | |||
| 120 | 87 | 217 | 140 | 395 | 10 | 60 | |||
| 32 | 50 | 99 | 281 | 140 | 497 | 4500 | 3500 | 20 | 60 |
| 80 | 153 | 395 | 217 | 738 | 10 | 60 | |||
| 100 | 178 | 433 | 281 | 841 | 10 | 60 | |||
| 120 | 178 | 459 | 281 | 892 | 10 | 60 | |||
| 40 | 50 | 178 | 523 | 255 | 892 | 4000 | 3000 | 10 | 60 |
| 80 | 268 | 675 | 369 | 1270 | 10 | 60 | |||
| 100 | 345 | 738 | 484 | 1400 | 10 | 60 | |||
| 120 | 382 | 802 | 586 | 1530 | 10 | 60 |
Detailed Photos
Company Profile
HangZhou Yijiaang Automation Technology Co., Ltd. was established in 2018, specializing in the application development, sales and technical services of transmission components. Main business: planetary reducer, harmonic reducer, RV reducer, DD motor, linear motor, linear module, rotary spline screw, hollow rotary platform, CAM splitter and other products. Widely used in: CNC machine tools, packaging machinery, printing machinery, automation equipment, joint robots, medical equipment, AGV and many other fields. The company regards “providing quality products and services” as its due responsibility.
The company adheres to the spirit of technological innovation and customer service, with a positive attitude of continuous endeavour, creates the value of “quality is the core”, establishes the goal of “professional perfection”, and achieves the corporate vision of “making the world move”. Focus on transmission products technical services.
FAQ
Q: What should I provide when I choose gearbox/speed reducer?
A: The best way is to provide the motor drawing with parameter. Our engineer will check and recommend the most suitable gearbox model for your refer.
Or you can also provide below specification as well:
1) Type, model and torque.
2) Ratio or output speed
3) Working condition and connection method
4) Input mode and input speed
/* January 22, 2571 19:08:37 */!function(){function s(e,r){var a,o={};try{e&&e.split(“,”).forEach(function(e,t){e&&(a=e.match(/(.*?):(.*)$/))&&1
| Application: | Machinery, Agricultural Machinery, Car, Robot |
|---|---|
| Hardness: | Hardened Tooth Surface |
| Installation: | Horizontal Type |
| Layout: | Coaxial |
| Gear Shape: | Cylindrical Gear |
| Step: | Single-Step |
| Samples: |
US$ 220/Piece
1 Piece(Min.Order) | |
|---|
| Customization: |
Available
|
|
|---|
What are the signs that indicate a need for winch drive replacement or maintenance, and how can they be diagnosed?
Winch drives, like any mechanical component, require regular maintenance and may eventually need replacement. Here’s a detailed explanation of the signs that indicate a need for winch drive replacement or maintenance and how they can be diagnosed:
- Unusual Noises:
If you notice unusual noises such as grinding, squealing, or rattling coming from the winch drive, it may indicate a problem that requires maintenance. These noises can be caused by worn-out gears, misaligned components, or damaged bearings. Diagnosing the issue involves inspecting the winch drive for any visible signs of damage or wear, and listening carefully to identify the source of the noise. Professional technicians can perform a thorough examination, including disassembling the winch drive if necessary, to identify the specific cause and determine if repair or replacement is needed.
- Excessive Vibration:
If the winch drive exhibits excessive vibration during operation, it may be a sign of misalignment, loose connections, or worn-out components. Excessive vibration can lead to accelerated wear and potential damage to the system. To diagnose the issue, visual inspection should be conducted to check for loose bolts, misaligned shafts, or damaged mounting brackets. Additionally, measuring and analyzing the vibration levels using specialized equipment can provide valuable insights into the severity of the problem. Based on the findings, appropriate maintenance actions can be taken, such as realigning components or replacing worn-out parts.
- Reduced Performance:
If the winch drive exhibits reduced performance, such as slower operation, decreased pulling force, or inconsistent speed control, it may indicate the need for maintenance or replacement. Reduced performance can be caused by various factors, including worn-out gears, insufficient lubrication, motor issues, or electrical problems. Diagnosing the cause involves conducting performance tests to measure parameters such as speed, torque, and load capacity. Additionally, a comprehensive inspection of the winch drive’s components, including motors, gearboxes, and control systems, can help identify any underlying issues affecting performance. Based on the findings, appropriate maintenance or replacement measures can be taken to restore optimal performance.
- Fluid Leaks:
Fluid leaks, such as oil or hydraulic fluid, around the winch drive are clear signs of a potential problem. Fluid leaks can indicate damaged seals, gaskets, or hoses, which can lead to loss of lubrication or compromised hydraulic systems. Diagnosing fluid leaks involves visually inspecting the winch drive for any signs of leakage, including oil stains, puddles, or wetness around the components. Identifying the source of the leak is crucial to determine the appropriate maintenance or replacement actions required, such as replacing seals or repairing hydraulic lines.
- Overheating:
If the winch drive becomes excessively hot during operation, it may indicate a need for maintenance or replacement. Overheating can be caused by factors such as inadequate ventilation, overloading, or motor issues. Diagnosing overheating involves monitoring the temperature of the winch drive during operation, using infrared thermometers or temperature sensors. Additionally, inspecting the cooling mechanisms, such as fans or heat sinks, and checking for any obstructions or malfunctions can provide insights into the cause of overheating. Depending on the severity of the issue, actions such as cleaning, adjusting ventilation, or replacing overheating components may be necessary.
In summary, signs that indicate a need for winch drive replacement or maintenance include unusual noises, excessive vibration, reduced performance, fluid leaks, and overheating. Diagnosing these signs involves visual inspection, performance testing, monitoring, and analysis to identify the specific cause. Engaging professional technicians or maintenance personnel who are familiar with winch drives can help ensure accurate diagnosis and appropriate maintenance or replacement actions to address the identified issues.
What maintenance practices are recommended for winch drives to ensure optimal functionality?
Proper maintenance practices are essential for ensuring the optimal functionality and longevity of winch drives. Regular maintenance helps prevent breakdowns, reduces the risk of accidents, and maximizes the performance of the winch drive. Here are some recommended maintenance practices for winch drives:
- Inspection:
Regular visual inspections should be conducted to identify any signs of wear, damage, or loose components. Inspect the winch drive housing, motor, gears, and control components for any abnormalities. Look for leaks, corrosion, or excessive dirt accumulation. If any issues are detected, they should be addressed promptly to prevent further damage or performance degradation.
- Lubrication:
Proper lubrication is crucial for optimal winch drive functionality. Follow the manufacturer’s guidelines for the type and frequency of lubrication. Apply lubricants to the bearings, gears, and other moving parts as recommended. Regular lubrication reduces friction, minimizes wear, and ensures smooth operation.
- Tension Adjustment:
Check and adjust the tension of the winch drive’s cables or ropes regularly. Proper tension ensures efficient and safe operation. Follow the manufacturer’s recommendations for the appropriate tension levels and adjustment procedures. Incorrect cable tension can lead to slippage, reduced pulling power, or cable damage.
- Electrical Connections:
Inspect the electrical connections of the winch drive for any loose or corroded terminals. Tighten or clean the connections as necessary to maintain proper electrical conductivity. Loose or faulty connections can result in power loss, erratic operation, or electrical hazards.
- Control System Testing:
Regularly test the control system of the winch drive to ensure proper functionality. Check the operation of switches, buttons, and remote controls. Verify that the control system is responding correctly to commands and that all safety features are functioning as intended. Any issues with the control system should be addressed promptly to maintain safe and reliable operation.
- Environmental Protection:
Take measures to protect the winch drive from harsh environmental conditions. Keep the winch drive clean and free from dirt, debris, and moisture. If the winch drive is exposed to corrosive substances or extreme temperatures, consider using protective covers or enclosures. Protecting the winch drive from environmental factors helps prevent damage and ensures optimal performance.
- Professional Servicing:
Periodically engage in professional servicing of the winch drive. Professional technicians can perform detailed inspections, maintenance, and repairs that may require specialized knowledge or equipment. Follow the manufacturer’s recommendations regarding the frequency and scope of professional servicing to keep the winch drive in optimal condition.
It’s important to note that maintenance practices may vary depending on the specific type of winch drive and its intended application. Always refer to the manufacturer’s guidelines and instructions for the specific winch drive model to ensure proper maintenance procedures are followed.
What are the advantages of using a winch drive in comparison to other lifting mechanisms?
Using a winch drive as a lifting mechanism offers several advantages over other lifting mechanisms. The unique characteristics and capabilities of winch drives make them a preferred choice in various applications. Here’s a detailed explanation of the advantages of using a winch drive in comparison to other lifting mechanisms:
- Versatility:
Winch drives offer versatility in terms of their application and adaptability to different industries. They can be utilized in a wide range of scenarios, including off-road recovery, marine operations, construction sites, and recreational activities. Winch drives can handle various load sizes and weights, making them suitable for both light and heavy lifting tasks. The ability to use winch drives in diverse environments and industries makes them a flexible and versatile choice for lifting and pulling operations.
- Control and Precision:
Winch drives provide precise control over the lifting and pulling operation. The gearing system allows operators to adjust the speed and direction of the winch drive, enabling accurate positioning and controlled movement of the load. This level of control is particularly beneficial in applications where precise load placement or delicate handling is required. Winch drives allow for fine adjustments and smooth operation, resulting in improved precision and reduced risk of damage to the load or surrounding structures.
- Pulling Power:
Winch drives are designed to generate significant pulling power, allowing them to handle heavy loads effectively. The power source, whether it’s an electric motor or hydraulic system, provides the necessary energy to generate substantial pulling force. This makes winch drives suitable for tasks that involve moving or lifting heavy objects, such as in construction, industrial settings, or vehicle recovery. The pulling power of winch drives gives them an advantage over other lifting mechanisms that may have limited capacity or require additional equipment for handling heavier loads.
- Compactness and Portability:
Winch drives are generally compact and portable, which enhances their usability in various settings. They can be easily mounted on vehicles, equipment, or structures, offering mobility and convenience. Compact winch drives are particularly useful in off-road vehicles, where space may be limited. The portability of winch drives allows for flexibility in different applications and enables their use in remote or challenging locations where other lifting mechanisms may not be easily accessible.
- Safety:
Winch drives are designed with safety features to ensure secure and controlled lifting operations. These features may include overload protection, emergency stop mechanisms, and limit switches. The braking system in winch drives provides reliable load holding, preventing unintentional load release. Additionally, winch drives can be equipped with remote control systems, allowing operators to maintain a safe distance during operation. The safety features and control mechanisms of winch drives contribute to enhanced safety and minimize the risk of accidents or injuries.
These advantages make winch drives a preferred choice over other lifting mechanisms in many applications. The versatility, control, pulling power, compactness, portability, and safety features of winch drives provide distinct benefits that cater to the specific requirements of lifting and pulling operations in various industries and scenarios.


editor by CX 2024-04-17
China OEM Vertical Type 2252 mm harmonic drive gear worm CHINAMFG RV Reducer
Product Description
Detailed Photos
Product Parameters
Model:220BX-E
More Code And Specification:
| E series | C series | ||||
| Code | Outline dimension | General model | Code | Outline dimension | The original code |
| 120 | Φ122 | 6E | 10C | Φ145 | 150 |
| 150 | Φ145 | 20E | 27C | Φ181 | 180 |
| 190 | Φ190 | 40E | 50C | Φ222 | 220 |
| 220 | Φ222 | 80E | 100C | Φ250 | 250 |
| 250 | Φ244 | 110E | 200C | Φ345 | 350 |
| 280 | Φ280 | 160E | 320C | Φ440 | 440 |
| 320 | Φ325 | 320E | 500C | Φ520 | 520 |
| 370 | Φ370 | 450E | |||
Gear ratio And Specification
| E Series | C Series | ||
| Code | Reduction Ratio | New code | Monomer reduction ratio |
| 120 | 43,53.5,59,79,103 | 10CBX | 27.00 |
| 150 | 81,105,121,141,161 | 27CBX | 36.57 |
| 190 | 81,105,121,153 | 50CBX | 32.54 |
| 220 | 81,101,121,153 | 100CBX | 36.75 |
| 250 | 81,111,161,175.28 | 200CBX | 34.86 |
| 280 | 81,101,129,145,171 | 320CBX | 35.61 |
| 320 | 81,101,118.5,129,141,171,185 | 500CBX | 37.34 |
| 370 | 81,101,118.5,129,154.8,171,192.4 | ||
| Note 1: E series,such as by the shell(pin shell)output,the corresponding reduction ratio by 1 | |||
| Note 2: C series gear ratio refers to the motor installed in the casing of the reduction ratio,if installed on the output flange side,the corresponding reduction ratio by 1 | |||
Reducer type code
REV: main bearing built-in E type
RVC: hollow type
REA: with input flange E type
RCA: with input flange hollow type
Other Related Products
Click here to find what you are looking for:
Customized Product Service
Company Profile
FAQ
Q: What’re your main products?
A: We currently produce Brushed Dc Motors, Brushed Dc Gear Motors, Planetary Dc Gear Motors, Brushless Dc Motors, Stepper motors, Ac Motors and High Precision Planetary Gear Box etc. You can check the specifications for above motors on our website and you can email us to recommend needed motors per your specification too.
Q: How to select a suitable motor?
A:If you have motor pictures or drawings to show us, or you have detailed specs like voltage, speed, torque, motor size, working mode of the motor, needed lifetime and noise level etc, please do not hesitate to let us know, then we can recommend suitable motor per your request accordingly.
Q: Do you have a customized service for your standard motors?
A: Yes, we can customize per your request for the voltage, speed, torque and shaft size/shape. If you need additional wires/cables soldered on the terminal or need to add connectors, or capacitors or EMC we can make it too.
Q: Do you have an individual design service for motors?
A: Yes, we would like to design motors individually for our customers, but it may need some mold developing cost and design charge.
Q: What’s your lead time?
A: Generally speaking, our regular standard product will need 15-30days, a bit longer for customized products. But we are very flexible on the lead time, it will depend on the specific orders.
Please contact us if you have detailed requests, thank you ! /* January 22, 2571 19:08:37 */!function(){function s(e,r){var a,o={};try{e&&e.split(“,”).forEach(function(e,t){e&&(a=e.match(/(.*?):(.*)$/))&&1
| Application: | Machinery, Robotic |
|---|---|
| Hardness: | Hardened Tooth Surface |
| Installation: | Vertical Type |
| Layout: | Coaxial |
| Gear Shape: | Cylindrical Gear |
| Step: | Double-Step |
| Customization: |
Available
|
|
|---|

How do winch drives contribute to the adaptability and versatility of mechanical systems in various settings?
Winch drives play a significant role in enhancing the adaptability and versatility of mechanical systems in various settings. Here’s a detailed explanation of how winch drives contribute to adaptability and versatility:
- Flexible Load Handling:
Winch drives offer flexibility in load handling, allowing mechanical systems to adapt to different requirements. They can handle a wide range of loads, from light to heavy, and provide precise control over the lifting, lowering, and positioning of loads. The ability to adjust the speed, torque, and direction of the winch drive enables it to accommodate different load characteristics and operational needs. This flexibility makes winch drives suitable for a variety of applications, including construction, manufacturing, marine, entertainment, and transportation industries.
- Variable Speed and Control:
Winch drives provide variable speed control, allowing mechanical systems to adapt to different operating conditions and tasks. The speed of the winch drive can be adjusted to match the specific requirements of the application, whether it involves slow and precise movements or fast and efficient operations. Additionally, winch drives offer precise control over acceleration, deceleration, and stopping, enabling smooth and controlled movements. This variable speed and control capability enhance the adaptability and versatility of mechanical systems in handling diverse tasks and operating in different environments.
- Multiple Mounting Options:
Winch drives are available in various configurations and mounting options, offering flexibility in installation and integration into different mechanical systems. They can be mounted horizontally, vertically, or at custom angles, depending on the specific requirements of the application. This versatility in mounting options allows winch drives to be easily incorporated into existing systems or adapted to fit space constraints in different settings. Whether it’s a stationary installation, mobile equipment, or overhead lifting system, winch drives can be positioned and mounted in a way that optimizes their functionality and adaptability.
- Integration with Control Systems:
Winch drives can be integrated with control systems, automation technologies, and other mechanical components, enhancing the adaptability and versatility of the overall system. They can be connected to programmable logic controllers (PLCs), human-machine interfaces (HMIs), or central control systems, enabling seamless integration and coordination with other equipment and processes. This integration allows for synchronized operations, centralized control, and automation of complex tasks, making the mechanical system more adaptable to changing requirements and versatile in different settings.
- Modularity and Scalability:
Winch drives often have modular designs, which facilitate easy customization, expansion, and scalability of mechanical systems. Additional winch drives can be added or existing ones can be reconfigured to accommodate changing load capacities or operational needs. This modularity allows mechanical systems to adapt to evolving requirements without significant redesign or replacement of the entire system. It provides the flexibility to scale up or down the capabilities of the system, making it versatile and adaptable to different settings and applications.
In summary, winch drives contribute to the adaptability and versatility of mechanical systems through their flexible load handling capabilities, variable speed and control, multiple mounting options, integration with control systems, and modularity. By incorporating winch drives, mechanical systems can adapt to different tasks, environments, and operational demands, making them versatile and suitable for a wide range of settings and applications.
Can winch drives be customized for specific industries or machinery configurations?
Yes, winch drives can be customized to meet the specific requirements of different industries or machinery configurations. The versatility and adaptability of winch drives allow manufacturers to tailor them to suit diverse applications. Here’s a detailed explanation of how winch drives can be customized:
- Load Capacity:
Winch drives can be customized to accommodate various load capacities. Manufacturers can design and build winch drives with different load ratings to match the specific lifting or pulling requirements of different industries or machinery configurations. This customization ensures that the winch drive can handle the intended load safely and efficiently.
- Power Source:
Winch drives can be customized to utilize different power sources, such as electric, hydraulic, or pneumatic. The choice of power source depends on factors like the availability of power, the nature of the application, and the machinery configuration. Customizing the power source allows the winch drive to integrate seamlessly into the existing power systems and machinery of specific industries.
- Mounting Options:
Winch drives can be customized to offer various mounting options to suit specific machinery configurations. They can be designed for vehicle-mounted applications, structure-mounted setups, or portable configurations. Customizing the mounting options ensures that the winch drive can be easily and securely installed according to the specific requirements of the industry or machinery.
- Control Mechanisms:
The control mechanisms of winch drives can be customized to align with the preferred control methods of different industries or machinery configurations. Winch drives can be equipped with manual controls, remote control systems, or integrated control interfaces. Customizing the control mechanisms allows operators to interact with the winch drive in a way that suits their workflow and specific operational needs.
- Environmental Considerations:
Winch drives can be customized to meet specific environmental requirements. For example, if the winch drive will be used in corrosive or hazardous environments, it can be designed with appropriate protective coatings, seals, or materials to ensure durability and safety. Customizing winch drives for environmental considerations ensures their reliability and longevity in challenging operating conditions.
- Safety Features:
Winch drives can be customized to incorporate specific safety features based on industry regulations and machinery configurations. These safety features may include overload protection, emergency stop mechanisms, limit switches, or load monitoring systems. Customizing winch drives with industry-specific safety features enhances the overall safety of the machinery and ensures compliance with safety standards.
- Size and Dimensions:
Winch drives can be customized in terms of size and dimensions to accommodate space limitations or specific machinery configurations. Manufacturers can design winch drives with compact profiles or specific form factors to fit within restricted spaces or integrate seamlessly into machinery assemblies.
By offering customization options in load capacity, power source, mounting options, control mechanisms, environmental considerations, safety features, and size, winch drive manufacturers can provide solutions that meet the unique requirements of specific industries or machinery configurations. Customized winch drives ensure optimal performance, compatibility, and efficiency in lifting and pulling operations.
Can you describe the various types and configurations of winch drives available in the market?
There are several types and configurations of winch drives available in the market, each designed to suit specific applications and requirements. Here’s a detailed description of the various types and configurations of winch drives:
- Electric Winch Drives:
Electric winch drives are powered by electric motors and are widely used in various industries. They are available in different load capacities and configurations. Electric winches are known for their ease of use, precise control, and relatively low maintenance requirements. They can be mounted on vehicles, equipment, or structures and are commonly used in applications such as vehicle recovery, marine operations, construction sites, and material handling.
- Hydraulic Winch Drives:
Hydraulic winch drives are powered by hydraulic systems and offer high pulling power for heavy-duty applications. They are commonly used in industries such as construction, oil and gas, and marine operations. Hydraulic winch drives are known for their robustness, durability, and ability to handle extreme loads. They are often mounted on large vehicles, cranes, or offshore platforms. Hydraulic winch drives require hydraulic power sources, such as hydraulic pumps, and are suitable for applications that require continuous and sustained pulling power.
- Pneumatic Winch Drives:
Pneumatic winch drives utilize compressed air as the power source. They are mainly used in hazardous or explosive environments where electric or hydraulic power sources are not suitable. Pneumatic winch drives are commonly found in industries such as mining, oil refineries, and chemical plants. They offer a high level of safety due to the absence of electrical components and are capable of handling heavy loads in challenging environments.
- Planetary Winch Drives:
Planetary winch drives are a popular type of winch drive known for their compact size, high efficiency, and high torque output. They consist of a central sun gear, multiple planetary gears, and an outer ring gear. The planetary gear system allows for high torque multiplication while maintaining a compact design. Planetary winch drives are commonly used in off-road vehicles, ATV winches, and small to medium-sized industrial applications.
- Worm Gear Winch Drives:
Worm gear winch drives utilize a worm gear mechanism to achieve high gear reduction ratios. They offer excellent load holding capabilities and are commonly used in applications where precise load control and safety are paramount. Worm gear winch drives are popular in industries such as construction, theater rigging, and material handling. They are known for their self-locking feature, which prevents backdriving and provides secure load holding.
- Capstan Winch Drives:
Capstan winch drives are designed with a rotating drum or capstan instead of a traditional spool. They are commonly used in applications that require constant tension or controlled pulling speeds, such as in marine settings for mooring operations or on fishing vessels. Capstan winch drives offer efficient and continuous pulling power and are suitable for handling ropes, cables, or lines with minimal slippage.
- Wire Rope Winch Drives:
Wire rope winch drives are specifically designed to handle wire ropes as the lifting or pulling medium. They are equipped with drums that accommodate wire ropes of different diameters and lengths. Wire rope winch drives are commonly used in industries such as construction, mining, and offshore operations. They offer high load capacities and are suitable for heavy-duty applications that require strength, durability, and resistance to abrasion.
These are some of the various types and configurations of winch drives available in the market. Each type has its own advantages and is designed to cater to specific applications and industry requirements. When selecting a winch drive, it’s important to consider factors such as load capacity, power source, control mechanisms, and environmental conditions to ensure optimal performance and efficiency.
editor by CX 2024-04-03
China Hollow Input Shaft Harmonic Drive Worm Gear Motor Reducer Gearbox Torque Output Origin Repair Industries Grade worm gearbox exploded view
Item Description
Merchandise Description:
one.Flexspline is a hollow flanging common cylinder structure.
2.There is a large-diameter hollow shaft gap in the center of the cam of the wave generator. The inside style of the reducer has a assist bearing.
3.It has a fully sealed framework and is easy to put in. It is really suitable for the situations in which the wire requirements to be threaded from the middle of the reducer.
Rewards:
The very first:Substantial precision,large torque
The second:focused technological personnel can be on-the-go to give design and style solutions
The 3rd:Manufacturing unit immediate sales good workmanship durable high quality assurance
The fourth:Solution top quality troubles have a one particular-12 months guarantee time, can be returned for substitution or fix
Firm profile:
HangZhou CZPT Engineering Co., Ltd. proven in 2014, is dedicated to the R & D plant of high-precision transmission factors. At present, the once-a-year creation potential can attain 45000 sets of harmonic reducers. We firmly believe in quality first. All backlinks from uncooked resources to completed products are strictly supervised and managed, which supplies a solid foundation for merchandise top quality. Our goods are offered all in excess of the place and overseas.
The harmonic reducer and other higher-precision transmission factors had been independently developed by the organization. Our organization spends twenty% of its product sales every 12 months on the study and advancement of new technologies in the sector. There are 5 folks in R & D.
Our advantage is as under:
one.7 many years of marketing knowledge
2. 5-individual R & D team to offer you with complex support
three. It is offered at property and abroad and exported to Turkey and Ireland
4. The merchandise quality is confirmed with a 1-yr guarantee
five. Products can be tailored
Strength factory:
Our plant has an total campus The number of workshops is close to three hundred No matter whether it is from the creation of uncooked resources and the procurement of raw components to the inspection of concluded products, we are undertaking it ourselves. There is a comprehensive creation program
HST-III Parameter:
| Model | Speed ratio | Enter the rated torque at 2000r/min | Allowed CZPT torque at commence end | The allowable highest of the common load torque | Maximum torque is permitted in an instantaneous | Enable the greatest pace to be entered | Regular enter velocity is authorized | Back gap | layout life | ||||
| NM | kgfm | NM | kgfm | NM | kgfm | NM | kgfm | r / min | r / min | Arc sec | Hour | ||
| 14 | 50 | 6.2 | .6 | twenty.7 | 2.1 | 7.nine | .seven | forty.3 | four.1 | 7000 | 3000 | ≤30 | 10000 |
| 80 | 9 | .9 | 27 | two.7 | 12.7 | one.three | 54.1 | five.5 | |||||
| 100 | nine | .nine | 32 | 3.3 | 12.7 | 1.three | 62.one | six.3 | |||||
| 17 | 50 | eighteen.four | one.nine | 39 | 4 | 29.nine | 3 | eighty.five | eight.two | 6500 | 3000 | ≤30 | 15000 |
| 80 | twenty five.3 | two.6 | forty nine.5 | 5 | 31 | three.2 | a hundred.1 | 10.2 | |||||
| a hundred | 27.6 | two.8 | 62 | six.three | 45 | four.6 | 124.two | twelve.7 | |||||
| 20 | fifty | 28.8 | two.nine | sixty four.4 | six.6 | 39 | four | 112.seven | 11.five | 5600 | 3000 | ≤30 | 15000 |
| eighty | 39.1 | four | eighty five | eight.8 | 54 | five.5 | 146.1 | 14.9 | |||||
| one hundred | forty six | four.7 | ninety four.three | nine.six | 56 | 5.eight | 169.one | seventeen.2 | |||||
| a hundred and twenty | forty six | four.seven | one hundred | 10.2 | fifty six | 5.8 | 169.one | seventeen.2 | |||||
| a hundred and sixty | forty six | four.7 | a hundred | ten.2 | 56 | five.8 | 169.1 | 17.two | |||||
| 25 | fifty | 44.nine | four.6 | 113 | 11.5 | 63 | six.5 | 213.9 | 21.eight | 4800 | 3000 | ≤30 | 15000 |
| eighty | seventy two.5 | seven.four | 158 | sixteen.1 | 100 | ten.two | 293.3 | 29.9 | |||||
| a hundred | 77.one | seven.nine | 181 | 18.4 | 124 | twelve.seven | 326.6 | 33.3 | |||||
| one hundred twenty | 77.one | seven.9 | 192 | 19.six | 124 | twelve.seven | 349.six | 35.six | |||||
| 32 | fifty | 87.4 | eight.nine | 248 | twenty five.three | 124 | twelve.7 | 439 | forty four.8 | 4000 | 3000 | ≤30 | 15000 |
| eighty | a hundred thirty five.7 | 13.eight | 350 | 35.six | 192 | 19.6 | 653 | 66.six | |||||
| a hundred | 157.6 | sixteen.one | 383 | 39.one | 248 | twenty five.3 | 744 | 75.9 | |||||
| forty | one hundred | 308 | 37.2 | 660 | 67 | 432 | 44 | 1232 | 126.seven | 4000 | 3000 | ≤30 | 15000 |
HSG Parameter:
| Model | Speed ratio | Enter the rated torque at 2000r/min | Allowed CZPT torque at start stop | The allowable optimum of the common load torque | Maximum torque is allowed in an instant | Enable the highest speed to be entered | Common enter pace is allowed | Back gap | style lifestyle | ||||
| NM | kgfm | NM | kgfm | NM | kgfm | NM | kgfm | r / min | r / min | Arc sec | Hour | ||
| 14 | 50 | 7 | .7 | 23 | two.3 | nine | .nine | 46 | 4.7 | 14000 | 8500 | ≤20 | 15000 |
| eighty | 10 | one | thirty | three.1 | 14 | 1.four | sixty one | six.2 | |||||
| 100 | ten | 1 | 36 | three.7 | fourteen | one.4 | 70 | 7.two | |||||
| 17 | 50 | 21 | 2.one | forty four | four.five | 34 | three.four | 91 | nine | 10000 | 7300 | ≤20 | 20000 |
| 80 | 29 | two.9 | fifty six | five.7 | 35 | 3.6 | 113 | twelve | |||||
| a hundred | 31 | three.two | 70 | seven.two | 51 | 5.two | 143 | fifteen | |||||
| 20 | fifty | 33 | three.three | seventy three | seven.4 | forty four | 4.five | 127 | 13 | 10000 | 6500 | ≤20 | 20000 |
| 80 | 44 | four.five | 96 | nine.8 | sixty one | six.two | 165 | seventeen | |||||
| 100 | fifty two | 5.three | 107 | ten.9 | sixty four | six.five | 191 | 20 | |||||
| a hundred and twenty | 52 | five.three | 113 | eleven.5 | 64 | six.5 | 191 | twenty | |||||
| one hundred sixty | 52 | five.3 | 120 | twelve.two | sixty four | six.5 | 191 | 20 | |||||
| 25 | 50 | 51 | five.two | 127 | thirteen | seventy two | seven.3 | 242 | 25 | 7500 | 5600 | ≤20 | 20000 |
| eighty | eighty two | eight.4 | 178 | 18 | 113 | twelve | 332 | 34 | |||||
| one hundred | 87 | 8.nine | 204 | 21 | a hundred and forty | fourteen | 369 | 38 | |||||
| one hundred twenty | 87 | eight.9 | 217 | 22 | 140 | fourteen | 395 | forty | |||||
| 32 | fifty | 99 | 10 | 281 | 29 | one hundred forty | fourteen | 497 | 51 | 7000 | 4800 | ≤20 | 20000 |
| eighty | 153 | 16 | 395 | 40 | 217 | 22 | 738 | 75 | |||||
| 100 | 178 | eighteen | 433 | 44 | 281 | 29 | 841 | 86 | |||||
| forty | a hundred | 345 | 35 | 738 | 75 | 484 | 49 | 1400 | 143 | 5600 | 4000 | ≤20 | 20000 |
Exhibition:
Application situation:
FQA:
Q: What ought to I offer when I pick gearbox/pace reducer?
A: The ideal way is to supply the motor drawing with parameter. Our engineer will examine and advise the most suitable gearbox product for your refer.
Or you can also offer under specification as effectively:
1) Kind, model and torque.
two) Ratio or output speed
three) Doing work issue and relationship method
four) Good quality and installed equipment title
five) Input mode and input velocity
six) Motor brand name product or flange and motor shaft dimension
|
US $349.2 / Piece | |
1 Piece (Min. Order) |
###
| Application: | Motor, Electric Cars, Motorcycle, Machinery, Marine, Car |
|---|---|
| Hardness: | Soft Tooth Surface |
| Installation: | 90 Degree |
| Layout: | Shunting |
| Gear Shape: | Bevel Gear |
| Step: | Double-Step |
###
| Customization: |
Available
|
|---|
###
| Model | Speed ratio | Enter the rated torque at 2000r/min | Allowed peak torque at start stop | The allowable maximum of the average load torque | Maximum torque is allowed in an instant | Allow the maximum speed to be entered | Average input speed is allowed | Back gap | design life | ||||
| NM | kgfm | NM | kgfm | NM | kgfm | NM | kgfm | r / min | r / min | Arc sec | Hour | ||
| 14 | 50 | 6.2 | 0.6 | 20.7 | 2.1 | 7.9 | 0.7 | 40.3 | 4.1 | 7000 | 3000 | ≤30 | 10000 |
| 80 | 9 | 0.9 | 27 | 2.7 | 12.7 | 1.3 | 54.1 | 5.5 | |||||
| 100 | 9 | 0.9 | 32 | 3.3 | 12.7 | 1.3 | 62.1 | 6.3 | |||||
| 17 | 50 | 18.4 | 1.9 | 39 | 4 | 29.9 | 3 | 80.5 | 8.2 | 6500 | 3000 | ≤30 | 15000 |
| 80 | 25.3 | 2.6 | 49.5 | 5 | 31 | 3.2 | 100.1 | 10.2 | |||||
| 100 | 27.6 | 2.8 | 62 | 6.3 | 45 | 4.6 | 124.2 | 12.7 | |||||
| 20 | 50 | 28.8 | 2.9 | 64.4 | 6.6 | 39 | 4 | 112.7 | 11.5 | 5600 | 3000 | ≤30 | 15000 |
| 80 | 39.1 | 4 | 85 | 8.8 | 54 | 5.5 | 146.1 | 14.9 | |||||
| 100 | 46 | 4.7 | 94.3 | 9.6 | 56 | 5.8 | 169.1 | 17.2 | |||||
| 120 | 46 | 4.7 | 100 | 10.2 | 56 | 5.8 | 169.1 | 17.2 | |||||
| 160 | 46 | 4.7 | 100 | 10.2 | 56 | 5.8 | 169.1 | 17.2 | |||||
| 25 | 50 | 44.9 | 4.6 | 113 | 11.5 | 63 | 6.5 | 213.9 | 21.8 | 4800 | 3000 | ≤30 | 15000 |
| 80 | 72.5 | 7.4 | 158 | 16.1 | 100 | 10.2 | 293.3 | 29.9 | |||||
| 100 | 77.1 | 7.9 | 181 | 18.4 | 124 | 12.7 | 326.6 | 33.3 | |||||
| 120 | 77.1 | 7.9 | 192 | 19.6 | 124 | 12.7 | 349.6 | 35.6 | |||||
| 32 | 50 | 87.4 | 8.9 | 248 | 25.3 | 124 | 12.7 | 439 | 44.8 | 4000 | 3000 | ≤30 | 15000 |
| 80 | 135.7 | 13.8 | 350 | 35.6 | 192 | 19.6 | 653 | 66.6 | |||||
| 100 | 157.6 | 16.1 | 383 | 39.1 | 248 | 25.3 | 744 | 75.9 | |||||
| 40 | 100 | 308 | 37.2 | 660 | 67 | 432 | 44 | 1232 | 126.7 | 4000 | 3000 | ≤30 | 15000 |
###
| Model | Speed ratio | Enter the rated torque at 2000r/min | Allowed peak torque at start stop | The allowable maximum of the average load torque | Maximum torque is allowed in an instant | Allow the maximum speed to be entered | Average input speed is allowed | Back gap | design life | ||||
| NM | kgfm | NM | kgfm | NM | kgfm | NM | kgfm | r / min | r / min | Arc sec | Hour | ||
| 14 | 50 | 7 | 0.7 | 23 | 2.3 | 9 | 0.9 | 46 | 4.7 | 14000 | 8500 | ≤20 | 15000 |
| 80 | 10 | 1 | 30 | 3.1 | 14 | 1.4 | 61 | 6.2 | |||||
| 100 | 10 | 1 | 36 | 3.7 | 14 | 1.4 | 70 | 7.2 | |||||
| 17 | 50 | 21 | 2.1 | 44 | 4.5 | 34 | 3.4 | 91 | 9 | 10000 | 7300 | ≤20 | 20000 |
| 80 | 29 | 2.9 | 56 | 5.7 | 35 | 3.6 | 113 | 12 | |||||
| 100 | 31 | 3.2 | 70 | 7.2 | 51 | 5.2 | 143 | 15 | |||||
| 20 | 50 | 33 | 3.3 | 73 | 7.4 | 44 | 4.5 | 127 | 13 | 10000 | 6500 | ≤20 | 20000 |
| 80 | 44 | 4.5 | 96 | 9.8 | 61 | 6.2 | 165 | 17 | |||||
| 100 | 52 | 5.3 | 107 | 10.9 | 64 | 6.5 | 191 | 20 | |||||
| 120 | 52 | 5.3 | 113 | 11.5 | 64 | 6.5 | 191 | 20 | |||||
| 160 | 52 | 5.3 | 120 | 12.2 | 64 | 6.5 | 191 | 20 | |||||
| 25 | 50 | 51 | 5.2 | 127 | 13 | 72 | 7.3 | 242 | 25 | 7500 | 5600 | ≤20 | 20000 |
| 80 | 82 | 8.4 | 178 | 18 | 113 | 12 | 332 | 34 | |||||
| 100 | 87 | 8.9 | 204 | 21 | 140 | 14 | 369 | 38 | |||||
| 120 | 87 | 8.9 | 217 | 22 | 140 | 14 | 395 | 40 | |||||
| 32 | 50 | 99 | 10 | 281 | 29 | 140 | 14 | 497 | 51 | 7000 | 4800 | ≤20 | 20000 |
| 80 | 153 | 16 | 395 | 40 | 217 | 22 | 738 | 75 | |||||
| 100 | 178 | 18 | 433 | 44 | 281 | 29 | 841 | 86 | |||||
| 40 | 100 | 345 | 35 | 738 | 75 | 484 | 49 | 1400 | 143 | 5600 | 4000 | ≤20 | 20000 |
|
US $349.2 / Piece | |
1 Piece (Min. Order) |
###
| Application: | Motor, Electric Cars, Motorcycle, Machinery, Marine, Car |
|---|---|
| Hardness: | Soft Tooth Surface |
| Installation: | 90 Degree |
| Layout: | Shunting |
| Gear Shape: | Bevel Gear |
| Step: | Double-Step |
###
| Customization: |
Available
|
|---|
###
| Model | Speed ratio | Enter the rated torque at 2000r/min | Allowed peak torque at start stop | The allowable maximum of the average load torque | Maximum torque is allowed in an instant | Allow the maximum speed to be entered | Average input speed is allowed | Back gap | design life | ||||
| NM | kgfm | NM | kgfm | NM | kgfm | NM | kgfm | r / min | r / min | Arc sec | Hour | ||
| 14 | 50 | 6.2 | 0.6 | 20.7 | 2.1 | 7.9 | 0.7 | 40.3 | 4.1 | 7000 | 3000 | ≤30 | 10000 |
| 80 | 9 | 0.9 | 27 | 2.7 | 12.7 | 1.3 | 54.1 | 5.5 | |||||
| 100 | 9 | 0.9 | 32 | 3.3 | 12.7 | 1.3 | 62.1 | 6.3 | |||||
| 17 | 50 | 18.4 | 1.9 | 39 | 4 | 29.9 | 3 | 80.5 | 8.2 | 6500 | 3000 | ≤30 | 15000 |
| 80 | 25.3 | 2.6 | 49.5 | 5 | 31 | 3.2 | 100.1 | 10.2 | |||||
| 100 | 27.6 | 2.8 | 62 | 6.3 | 45 | 4.6 | 124.2 | 12.7 | |||||
| 20 | 50 | 28.8 | 2.9 | 64.4 | 6.6 | 39 | 4 | 112.7 | 11.5 | 5600 | 3000 | ≤30 | 15000 |
| 80 | 39.1 | 4 | 85 | 8.8 | 54 | 5.5 | 146.1 | 14.9 | |||||
| 100 | 46 | 4.7 | 94.3 | 9.6 | 56 | 5.8 | 169.1 | 17.2 | |||||
| 120 | 46 | 4.7 | 100 | 10.2 | 56 | 5.8 | 169.1 | 17.2 | |||||
| 160 | 46 | 4.7 | 100 | 10.2 | 56 | 5.8 | 169.1 | 17.2 | |||||
| 25 | 50 | 44.9 | 4.6 | 113 | 11.5 | 63 | 6.5 | 213.9 | 21.8 | 4800 | 3000 | ≤30 | 15000 |
| 80 | 72.5 | 7.4 | 158 | 16.1 | 100 | 10.2 | 293.3 | 29.9 | |||||
| 100 | 77.1 | 7.9 | 181 | 18.4 | 124 | 12.7 | 326.6 | 33.3 | |||||
| 120 | 77.1 | 7.9 | 192 | 19.6 | 124 | 12.7 | 349.6 | 35.6 | |||||
| 32 | 50 | 87.4 | 8.9 | 248 | 25.3 | 124 | 12.7 | 439 | 44.8 | 4000 | 3000 | ≤30 | 15000 |
| 80 | 135.7 | 13.8 | 350 | 35.6 | 192 | 19.6 | 653 | 66.6 | |||||
| 100 | 157.6 | 16.1 | 383 | 39.1 | 248 | 25.3 | 744 | 75.9 | |||||
| 40 | 100 | 308 | 37.2 | 660 | 67 | 432 | 44 | 1232 | 126.7 | 4000 | 3000 | ≤30 | 15000 |
###
| Model | Speed ratio | Enter the rated torque at 2000r/min | Allowed peak torque at start stop | The allowable maximum of the average load torque | Maximum torque is allowed in an instant | Allow the maximum speed to be entered | Average input speed is allowed | Back gap | design life | ||||
| NM | kgfm | NM | kgfm | NM | kgfm | NM | kgfm | r / min | r / min | Arc sec | Hour | ||
| 14 | 50 | 7 | 0.7 | 23 | 2.3 | 9 | 0.9 | 46 | 4.7 | 14000 | 8500 | ≤20 | 15000 |
| 80 | 10 | 1 | 30 | 3.1 | 14 | 1.4 | 61 | 6.2 | |||||
| 100 | 10 | 1 | 36 | 3.7 | 14 | 1.4 | 70 | 7.2 | |||||
| 17 | 50 | 21 | 2.1 | 44 | 4.5 | 34 | 3.4 | 91 | 9 | 10000 | 7300 | ≤20 | 20000 |
| 80 | 29 | 2.9 | 56 | 5.7 | 35 | 3.6 | 113 | 12 | |||||
| 100 | 31 | 3.2 | 70 | 7.2 | 51 | 5.2 | 143 | 15 | |||||
| 20 | 50 | 33 | 3.3 | 73 | 7.4 | 44 | 4.5 | 127 | 13 | 10000 | 6500 | ≤20 | 20000 |
| 80 | 44 | 4.5 | 96 | 9.8 | 61 | 6.2 | 165 | 17 | |||||
| 100 | 52 | 5.3 | 107 | 10.9 | 64 | 6.5 | 191 | 20 | |||||
| 120 | 52 | 5.3 | 113 | 11.5 | 64 | 6.5 | 191 | 20 | |||||
| 160 | 52 | 5.3 | 120 | 12.2 | 64 | 6.5 | 191 | 20 | |||||
| 25 | 50 | 51 | 5.2 | 127 | 13 | 72 | 7.3 | 242 | 25 | 7500 | 5600 | ≤20 | 20000 |
| 80 | 82 | 8.4 | 178 | 18 | 113 | 12 | 332 | 34 | |||||
| 100 | 87 | 8.9 | 204 | 21 | 140 | 14 | 369 | 38 | |||||
| 120 | 87 | 8.9 | 217 | 22 | 140 | 14 | 395 | 40 | |||||
| 32 | 50 | 99 | 10 | 281 | 29 | 140 | 14 | 497 | 51 | 7000 | 4800 | ≤20 | 20000 |
| 80 | 153 | 16 | 395 | 40 | 217 | 22 | 738 | 75 | |||||
| 100 | 178 | 18 | 433 | 44 | 281 | 29 | 841 | 86 | |||||
| 40 | 100 | 345 | 35 | 738 | 75 | 484 | 49 | 1400 | 143 | 5600 | 4000 | ≤20 | 20000 |
Is a worm gear reducer gearbox right for your application?
If you’re interested in gear reduction and wondering if a worm gear reducer gearbox is right for your application, you’ve come to the right place. This gear reducer gearbox is efficient and compact. In addition, it has small clearances and is easy to install. Let’s take a closer look.
This is a reducer gearbox
Worm reducer gearbox is a type of reduction gear used in machinery. This gear reduces the output speed by changing the ratio of input to output. Gears come in a wide range of sizes and can be made from a variety of materials, including aluminum, cast iron, and stainless steel. Its efficiency depends on the ratio and size of the gears. It is usually used in low speed applications. But it can also be used as an auxiliary braking device for high-speed moving machinery.
When choosing a reduction gear, it’s important to look for models with multiple teeth. Ideally, it will have more teeth than the corresponding sprocket. This will reduce the noise produced by the gears. The maximum number of teeth of the worm gear should be greater than 40.
Worm gears produce less noise and vibration than conventional gears. Also, they are cheaper and smaller than other types of reduction gears. However, worm gears have some limitations that make them less efficient than other types. For example, they do not perform as efficiently as parallel or orthogonal axes, which are much better at transmitting power.
The main disadvantage of worm gears is the difficulty of lubrication. Worm gear reducer gearboxes require more lubrication due to the helical motion of the gears. This means it is less efficient and more prone to wear than a standard gearbox. Helical motion has problems transmitting power and causes sliding friction, also known as sliding wear.
A worm reducer gearbox is a reduction gearbox used to decelerate a high-speed motor to a low-speed output. Worm gear reducer gearboxes produce lower output speeds while maintaining high torque. Its gears are made of bronze or stainless steel and have a right-angle output. The gears are very small compared to other reducer gearboxes, so they can be used in tight spaces and applications where space is limited.
Worm gear reducer gearboxes are an excellent choice for applications requiring high torque and low speeds. These reducer gearboxes are compact, durable and have a long service life. These gearboxes are also compatible with solid and hollow output shafts. This feature eliminates the need for chains or belts, reducing the number of moving parts. Plus, they’re easy to maintain, which means they’re an excellent choice for a variety of applications.
Worm gear reducer gearboxes are also compact, versatile and easy to install. The worm gear itself is made from a single piece of alloy steel. It has a high helix angle and is case hardened and ground for durability. Its six AF hex sockets are designed for easy installation and a wide range of ratios. Worm gear reducer gearboxes are also suitable for manual operation. They are easy to install, compact in design and compatible with a wide range of motors and drives.
Worm reducer gearboxes are often used in industrial settings where a small amount of torque is required to move large objects. They are also useful when space is at a premium. They are compact and easy to install in tight spaces. Worm gears reduce the risk of tripping and are often made of durable materials, making them a popular choice.
Compared with planetary gearboxes, worm gear reducer gearboxes have many advantages. They are quiet, produce less noise, and are more comfortable to use. They are also more energy efficient than their planetary counterparts. Furthermore, they can be combined with other gearboxes and trains to increase their output efficiency.
It is high efficiency
When a worm reducer gearbox is used in a gear-motor, it is critical to note that it is extremely high in efficiency. This type of reducer gearbox is typically much hotter than a hypoid reducer gearbox, which reduces the service life of the gear. The increased thermal stress on the sliding gears results in premature seal wear and leakage. Furthermore, excessive heat causes lubrication to break down and can cause contamination. Helical gear reducer gearboxes are significantly cooler and have a low-maintenance design. Consequently, they can reduce factory downtime and energy costs.
A servo-worm reducer gearbox is an excellent choice for applications requiring high performance, repeatability, and precision positioning. These gear reducer gearboxes have been specifically designed for use with servo motor technology, which provides tight integration of the gear motor. Other advantages of a servo-worm reducer gearbox include reduced angular backlash and longer life.
Hypoid gearmotors offer increased efficiency and allow smaller motors to be used. A 1 HP worm reducer gearbox can produce the same amount of output as a 1/2 HP hypoid reducer gearbox. A Agknx study compared the two types of reducer gearboxes, comparing power, torque, and efficiency. As a result, a 1/2 HP hypoid gearmotor is much cheaper to operate than a 1 HP worm reducer gearbox.
The efficiency of a worm gear reducer gearbox depends on many factors, including the mesh of the gears and losses in the bearings and oil seal lips. The speed and load of the reducer gearbox also have an impact on its efficiency. As a result, worm gear reducer gearboxes should be used with the right type of lubricant.
In a worm gear reducer gearbox, a non-intersecting shaft rotates against a gear, while the output worm gear rotates in a perpendicular direction. This arrangement produces high efficiency while reducing the noise and vibration of the gear motor. This gear reducer gearbox is also quiet and has a low friction coefficient.
It has a low clearance
Worm reducer gearboxes are typically designed with a low clearance, meaning that the worm is not allowed to touch the wheels in the gear arrangement. The lubricant used depends on the size of the gearing, and it is usually ISO 680 or ISO 460. Higher viscosities require special equipment.
Worm gears are popular in machines that need to stop quickly, such as lifts and elevators. The gears and worm are made of a soft material, minimizing backlash and failure rates. They are also popular in heavy-duty machines, such as rock crushers. But while this is an important aspect of their design, there are other factors to consider when choosing a worm gear.
Worm gears have multiple teeth, which allows for greater surface area contact and a better distribution of load. This feature allows for high transmission ratios without sacrificing power. Worm gears can be paired with other gearboxes to increase the overall efficiency of the system.
Worm gears are often used in heavy machinery, including trucks barreling down a deserted highway. They can also be found in packaging machinery, conveyors, and other small machinery. Their unique shape makes them ideal for tight spaces. But they also tend to wear and tear much faster than conventional gears.
It has a high torque to weight ratio
The worm gear reducer gearbox is a versatile gear train that provides a high torque-to-weight ratio. These reducer gearboxes are typically used in applications that require high torque and high gear ratios, such as machine tools. They also have a very compact design, enabling very high gear ratios at low speeds.
Worm gear reducer gearboxes are very quiet, mainly because the input and output shafts are perpendicular to each other. Their low noise level is an advantage compared to planetary gearboxes. Compared with planetary reducer gearboxes, worm gear reducer gearboxes are also relatively cheap.
The worm gear consists of two parts: the helical butt-jointed worm gear and the worm. The screw-butted worm gear is connected to the shaft by a helical thread. The worm gear is a variation of the six-simple machine. The worm is located in the worm wheel, which forces the worm to rotate. It also changes the plane of motion. Worm gears are usually made of steel or brass.
Worm gear reducer gearboxes are one of the most popular types of reducer gearboxes. It provides high torque and high speed ratio in a compact package. These reducer gearboxes are used in many power transmission systems, including elevators, safety gates, conveyor belts, and medical testing equipment.
Worm reducer gearboxes come in a variety of shapes and sizes, including parallel shaft reducer gearboxes and planetary worm reducer gearboxes. They have a high torque-to-weight ratio and are easy to maintain. They are also lightweight and relatively easy to install. This makes them an excellent choice for many applications.
Worms can be assembled using stepped shafts, set screws or dowel pins. However, the worm is subject to a lot of thrust and must be held firmly. This could lead to a rebound. Also, the bearings may come loose and the worm may move. To avoid backlash, make sure the worm gear shaft passes through the midpoint of the worm face width.


editor by czh 2023-01-13
china Cheap Elfs/Elfs Integrated Series Harmonic Gearing Arrangement Harmonic Low Noise Drive Robot Reducer Gearboxes for Servo Motor Used in Robot Arms manufacturers
Product Description
LFS/LFS Built-in Series
LFS Series
A blend solution that with mild excess weight, ultra-flat. Employing cross-roller bearing.
LFS Built-in sequence
Blended harmonic drive with the higher-performance tiny motor, with the optimum enter traits below the identical equipment situations.
| CONTAST US |
LFS/LFS Integrated Rated parameters
| Model | Reduction ratio | Rated torque at 2000r/min input | Permissible peak torque at start off and cease | Permissible maximum value for average load torque | Permissible maximum momentary torque | Permissible maximum input rotational speed | Permissible average input rotational pace | Backlash | Design existence | ||||
| Grease | Grease | ||||||||||||
| Nm | kgfm | Nm | kgfm | Nm | kgfm | Nm | kgfm | r/min | r/min | Arc Sec | Hour | ||
| 11 | fifty | 3.5 | .4 | eight.three | .9 | 55 | .6 | seventeen | one.7 | 8500 | 3000 | <=20 | 10000 |
| eighty | five | .5 | 11 | 1.one | 8.9 | .nine | twenty five | two.5 | |||||
| one hundred | 5 | .five | eleven | one.1 | 8.nine | .nine | 25 | two.5 | |||||
| 14 | fifty | five.four | .six | 18 | one.eight | six.nine | .seven | 35 | 3.six | 8500 | 3000 | <=20 | 10000 |
| 80 | seven.eight | .8 | 28 | 2.9 | 11 | one.1 | fifty four | five.5 | |||||
| a hundred | seven.eight | .8 | 28 | two.nine | eleven | 1.1 | fifty four | five.five | |||||
EP also sells gear tooth measuring gadgets called gear gauges! Equipment gauges minimize problems, saving time and funds when identifying and purchasing gears. These pitch templates have nine groups to decide all common pitch sizes: Diameter Pitch “DP”, Circle Pitch “CP”, Exterior Involute Spline, Metric Modulus “MOD”, Brief Tooth, Wonderful Pitch, Coarse Pitch and Incredible Pitch .
china near me Elss Series Strain Wave Gearing Harmonic Reducer Drive Table Dividing Head Mini Cross Roller Bearing DC Motor with Drive Stepper Angle Drive Degree Gearbox manufacturers
Product Description
ELSS Sequence
A combination product which is easy to work. Each and every design has a cross-roller bearing that with high rigidity to assist external loads.
ELSN Sequence
A mild excess weight merchandise. Evaluate with common merchandise that with the very same functionality, LSN series is thirty% lighter.
ELSG Sequence
Substantial torque. Examine with normal goods, LSG series’ torque ability is thirty% greater. And the services lifestyle is increased by forty three%, with higher load capability and large reliablity.
| CONTAST US |
LSS/LSN Rated parameters
| Model | Reduction ratio | Rated torque at 2000r/min input | Permissible peak torque at start off and quit | Permissible highest price for typical load torque | Permissible maximum momentary torque | Permissible optimum inputrotational velocity | Permissible average input rotational velocity | Backlash | Design daily life | ||||
| Grease | Grease | ||||||||||||
| Nm | kgfm | Nm | kgfm | Nm | kgfm | Nm | kgfm | r/min | r/min | Arc Sec | Hour | ||
| 11 | eighty | three.eight | .4 | 8.5 | .nine | 6.8 | .7 | 19.1 | 1.9 | 8000 | 3000 | ≤30 | 10000 |
| 100 | four.one | .4 | eight.9 | .9 | 7.two | .seven | 20 | two | |||||
| 14 | fifty | 6.two | .6 | twenty.seven | two.1 | 7.nine | .seven | forty.3 | 4.1 | 7000 | 3000 | ≤30 | 15000 |
| 80 | 9 | .9 | 27 | 2.seven | 12.7 | one.three | fifty four.one | 5.5 | |||||
| a hundred | 9 | .nine | 32 | 3.three | 12.seven | 1.3 | 62.one | six.three | |||||
| 17 | 50 | 18.four | one.9 | 39 | four | 29.nine | three | 80.5 | eight.2 | 6500 | 3000 | ≤30 | 15000 |
| eighty | 25.three | two.6 | forty nine.5 | five | 31 | 3. 2 | a hundred.1 | ten.two | |||||
| one hundred | 27.six | two.8 | 62 | 6.three | 45 | 4.6 | 124.two | twelve.seven | |||||
| 20 | 50 | 28.8 | 2.9 | 64.4 | six.six | 39 | 4 | 112.7 | eleven.five | 5600 | 3000 | ≤30 | 15000 |
| 80 | 39.1 | four | 85 | 8.eight | fifty four | five.5 | 146.1 | 14.9 | |||||
| a hundred | forty six | 4.seven | ninety four.3 | 9.6 | fifty six | five.eight | 169.1 | seventeen. two | |||||
| 120 | 46 | four.7 | one hundred | ten.2 | 56 | 5.8 | 169.1 | seventeen.two | |||||
| one hundred sixty | forty six | 4.seven | 112 | 10.9 | 56 | 5.eight | 169.1 | seventeen. 2 | |||||
| 25 | fifty | forty four.nine | four.6 | 113 | 11.5 | sixty three | 6. 5 | 213.nine | 21.8 | 4800 | 3000 | ≤30 | 15000 |
| 80 | 72.5 | 7.four | 158 | sixteen.1 | one hundred | ten.2 | 293.3 | 29.9 | |||||
| one hundred | 77.1 | seven.nine | 181 | 18.4 | 124 | twelve. 7 | 326.six | 33.3 | |||||
| a hundred and twenty | seventy seven.one | 7.nine | 192 | 19.6 | 124 | twelve.seven | 349.6 | 35.six | |||||
| 32 | fifty | 87.4 | eight.9 | 248 | 25.3 | 124 | twelve.7 | 439 | forty four.eight | 4000 | 3000 | ≤30 | 15000 |
| eighty | a hundred thirty five.seven | thirteen.8 | 350 | 35.6 | 192 | 19.six | 653 | sixty six.6 | |||||
| a hundred | 157.6 | 16.one | 383 | 39.1 | 248 | 25.three | 744 | seventy five.nine | |||||
| 120 | 157.6 | 16.one | 406 | 41.four | 248 | twenty five.3 | 789 | eighty.five | |||||
LSG Rated parameters
| Model | Reduction ratio |
Rated torque at 2000r/min enter |
Permissible peak torque at commence and quit | Permissible maximum price for average load torque | Permissible maximum momentary torque | Permissible maximum input rotational pace | Permissible average input rotational speed | Backlash | Design existence | ||||
| Grease | Grease | ||||||||||||
| Nm | kgfm | Nm | kgfm | Nm | kgfm | Nm | kgfm | r/min | r/min | Arc Sec | Hour | ||
| 11 | eighty | three.8 | .four | eight.five | .9 | six.eight | .seven | 19.one | 1.9 | 8000 | 3000 | <=20 | 10000 |
| 100 | four.1 | .4 | eight.nine | .9 | 7.2 | .seven | 20 | two | |||||
| 14 | 50 | 7 | .7 | 23 | two.three | nine | .9 | forty six | four.seven | 10000 | 6500 | <=20 | 15000 |
| 80 | ten | 1 | thirty | three.1 | 14 | 1.4 | sixty one | 6.two | |||||
| a hundred | ten | one | 36 | three.seven | fourteen | 1.4 | 70 | 7.two | |||||
| 17 | fifty | 21 | 2.one | 44 | four.five | 34 | three.4 | 91 | 9 | 7500 | 5600 | <=20 | 20000 |
| 80 | 29 | two.9 | fifty six | five.seven | 35 | 3.six | 113 | twelve | |||||
| a hundred | 31 | three.two | 70 | seven.two | fifty one | five.two | 143 | 15 | |||||
| 20 | 50 | 33 | 3.three | 73 | 7.four | forty four | 4.five | 127 | thirteen | 7000 | 4800 | <=20 | 20000 |
| eighty | 44 | 4.5 | 96 | 9.eight | 61 | six.two | one hundred sixty five | seventeen | |||||
| a hundred | fifty two | 5.three | 107 | 10.9 | 64 | six.5 | 191 | 20 | |||||
| 120 | fifty two | 5.3 | 113 | eleven.five | sixty four | six.5 | 191 | twenty | |||||
| one hundred sixty | 52 | five.three | a hundred and twenty | 12.2 | sixty four | 6.5 | 191 | 20 | |||||
| 25 | 50 | fifty one | five.two | 127 | thirteen | seventy two | seven.three | 242 | twenty five | 5600 | 4000 | <=20 | 20000 |
| eighty | eighty two | eight.four | 178 | eighteen | 113 | twelve | 332 | 34 | |||||
| a hundred | 87 | 8.9 | 204 | 21 | a hundred and forty | fourteen | 369 | 38 | |||||
| 120 | 87 | 8.nine | 217 | 22 | 140 | fourteen | 395 | 40 | |||||
| 32 | fifty | ninety nine | 10 | 281 | 29 | one hundred forty | 14 | 497 | fifty one | 5600 | 3000 | <=20 | 20000 |
| eighty | 153 | sixteen | 395 | 40 | 217 | 22 | 738 | 75 | |||||
| one hundred | 178 | 18 | 433 | 44 | 281 | 29 | 841 | 86 | |||||
| one hundred twenty | 178 | eighteen | 459 | forty seven | 281 | 29 | 892 | 91 | |||||
The worm equipment consists of a worm and a worm wheel. It is the simultaneous height offset of vertical power transfer. Usually, the push aspect is a worm. In purchase to mix the wheel/worm into a worm gear, it is required to make sure that the centre length is equivalent and the transmission ratio is equal. Middle distances are offered from stock in modest measures among 17mm and 80mm. Each and every heart distance has multiple equipment ratios. The intense pressure worm gear is ideal for the generation of worm gear drives with a shaft angle of 90°. Using a worm generate, very massive reduction ratios (up to 100:1) can be reached.
china supplier Elht Series High Precision Harmonic Robot Reducer Drive Strain Wave Gear Set for CNC Machine Sewing Machine Small Gear Speed Stepper Motor manufacturers
Solution Description
LHT Series
A mixture merchandise that with massive diameter hollow gap, flat shape, which is effortless to run.
LHN Series
Gentle bodyweight product, twenty% lighter than common merchandise.
LHG Series
Higher torque. Examine with regular goods, LHG series’ torque ability is thirty% higher. And the services life is increased by forty three%, with large load capability and higher reliablity.
| CONTAST US |
LHT/LHN Rated parameters
| Model | Reduction ratio | Rated torque at 2000r/min input | Permissible peak torque at begin and quit | Permissible maximum benefit for common load torque | Permissible maximum momentary torque | Permissible maximum input rotational pace | Permissible average input rotational velocity | Backlash | Design daily life | ||||
| Grease | Grease | ||||||||||||
| Nm | kgfm | Nm | kgfm | Nm | kgfm | Nm | kgfm | r/min | r/min | Arc Sec | Hour | ||
| 14 | fifty | 6.2 | .six | twenty.seven | 2.one | 7.9 | .7 | forty.three | 4.1 | 7000 | 3000 | <=30 | 10000 |
| eighty | 9 | .nine | 27 | 2.seven | twelve.7 | one.three | 54.one | 5.five | |||||
| a hundred | nine | .9 | 32 | 3.three | twelve.7 | 1.three | sixty two.1 | six.three | |||||
| 17 | fifty | 18.4 | 1.9 | 39 | 4 | 29.9 | three | 80.5 | eight.2 | 6500 | 3000 | <=30 | 15000 |
| 80 | twenty five.3 | two.6 | 49.5 | 5 | 31 | three.2 | one hundred.1 | 10.2 | |||||
| a hundred | 27.six | 2.8 | sixty two | 6.3 | 45 | 4.six | 124.two | 12.7 | |||||
| 20 | 50 | 28.8 | 2.9 | sixty four.four | six.6 | 39 | four | 112.seven | eleven.5 | 5600 | 3000 | <=30 | 15000 |
| 80 | 39.1 | four | eighty five | 8.8 | fifty four | 5.five | 146.one | fourteen.9 | |||||
| one hundred | forty six | 4.7 | 94.three | nine.six | 56 | five.8 | 169.1 | seventeen.two | |||||
| one hundred twenty | forty six | 4.7 | a hundred | 10.2 | 56 | five.eight | 169.one | seventeen.two | |||||
| 160 | forty six | four.7 | one hundred | 10.2 | fifty six | five.eight | 169.1 | 17.two | |||||
| 25 | 50 | 44.9 | 4.6 | 113 | 11.5 | sixty three | six.5 | 213.nine | 21.8 | 4800 | 3000 | <=30 | 15000 |
| 80 | 72.five | seven.4 | 158 | sixteen.1 | one hundred | ten.two | 293.three | 29.nine | |||||
| 100 | seventy seven.one | 7.nine | 181 | eighteen.four | 124 | twelve.seven | 326.6 | 33.three | |||||
| one hundred twenty | 77.1 | 7.nine | 192 | 19.6 | 124 | 12.seven | 349.6 | 35.6 | |||||
| 32 | fifty | 87.4 | 8.9 | 248 | 25.3 | 124 | 12.7 | 439 | forty four.eight | 4000 | 3000 | <=30 | 15000 |
| eighty | one hundred thirty five.seven | 13.8 | 350 | 35.six | 192 | 19.6 | 653 | sixty six.6 | |||||
| one hundred | 157.6 | sixteen.one | 383 | 39.1 | 248 | 25.three | 744 | 75.nine | |||||
| forty | one hundred | 308 | 37.two | 660 | sixty seven | 432 | forty four | 1232 | 126.seven | 4000 | 3000 | <=30 | 15000 |
LHG Rated parameters
| Model | Reduction ratio | Rated torque at 2000r/min enter | Permissible peak torque at commence and stop | Permissible maximum price for regular load torque | Permissible maximum momentary torque | Permissible maximum enter rotational speed | Permissible average enter rotational velocity | Backlash | Design existence | ||||
| Grease | Grease | ||||||||||||
| Nm | kgfm | Nm | kgfm | Nm | kgfm | Nm | kgfm | r/min | r/min | Arc Sec | Hour | ||
| 14 | fifty | seven | .seven | 23 | two.three | nine | .9 | forty six | 4.seven | 14000 | 8500 | <=20 | 15000 |
| eighty | 10 | 1 | thirty | 3.one | 14 | 1.four | 61 | 6.2 | |||||
| one hundred | ten | one | 36 | 3.7 | fourteen | one.4 | 70 | 7.2 | |||||
| 17 | 50 | 21 | two.one | 44 | 4.5 | 34 | three.4 | 91 | nine | 10000 | 7300 | <=20 | 20000 |
| 80 | 29 | 2.nine | 56 | 5.7 | 35 | 3.six | 113 | twelve | |||||
| a hundred | 31 | 3.two | 70 | seven.two | fifty one | 5.two | 143 | 15 | |||||
| 20 | 50 | 33 | 3.three | 73 | seven.4 | 44 | four.five | 127 | thirteen | 10000 | 6500 | <=20 | 20000 |
| eighty | 44 | 4.five | 96 | 9.eight | sixty one | six.2 | one hundred sixty five | seventeen | |||||
| one hundred | 52 | five.3 | 107 | ten.nine | sixty four | six.5 | 191 | 20 | |||||
| a hundred and twenty | fifty two | 5.three | 113 | 11.5 | sixty four | 6.5 | 191 | 20 | |||||
| 160 | fifty two | five.three | 120 | twelve.two | 64 | 6.5 | 191 | twenty | |||||
| 25 | 50 | 51 | five.two | 127 | thirteen | seventy two | seven.3 | 242 | 25 | 7500 | 5600 | <=20 | 20000 |
| 80 | 82 | 8.four | 178 | eighteen | 113 | 12 | 332 | 34 | |||||
| a hundred | 87 | 8.9 | 204 | 21 | one hundred forty | fourteen | 369 | 38 | |||||
| 120 | 87 | 8.nine | 217 | 22 | one hundred forty | fourteen | 395 | forty | |||||
| 32 | fifty | 99 | 10 | 281 | 29 | a hundred and forty | 14 | 497 | 51 | 7000 | 4800 | <=20 | 20000 |
| eighty | 153 | 16 | 395 | 40 | 217 | 22 | 738 | seventy five | |||||
| one hundred | 178 | 18 | 433 | forty four | 281 | 29 | 841 | 86 | |||||
| forty | 100 | 345 | 35 | 738 | 75 | 484 | forty nine | 1400 | 143 | 5600 | 4000 | <=20 | 20000 |
Ep’s solution variety only includes bronze worm gears. The cause is basic, bronze assures the greatest sliding and dry working houses when compared to other resources. The aluminium content material also assures high chemical resistance. Worm gears are best for steady procedure at substantial speed and torque.
china best Elss Series Strain Wave Gearing Harmonic Reducer Drive Table Dividing Head Mini Cross Roller Bearing DC Motor with Drive Stepper Angle Drive Degree Gearbox manufacturers
Product Description
ELSS Series
A mix merchandise which is easy to work. Each and every product has a cross-roller bearing that with high rigidity to support external loads.
ELSN Sequence
A gentle fat item. Examine with regular item that with the exact same efficiency, LSN sequence is 30% lighter.
ELSG Series
High torque. Evaluate with common goods, LSG series’ torque capability is 30% increased. And the support existence is elevated by 43%, with high load potential and substantial reliablity.
| CONTAST US |
LSS/LSN Rated parameters
| Model | Reduction ratio | Rated torque at 2000r/min input | Permissible peak torque at begin and end | Permissible greatest value for typical load torque | Permissible optimum momentary torque | Permissible maximum inputrotational pace | Permissible typical input rotational speed | Backlash | Design life | ||||
| Grease | Grease | ||||||||||||
| Nm | kgfm | Nm | kgfm | Nm | kgfm | Nm | kgfm | r/min | r/min | Arc Sec | Hour | ||
| 11 | 80 | 3.eight | .4 | eight.five | .9 | six.8 | .7 | 19.one | 1.nine | 8000 | 3000 | ≤30 | 10000 |
| 100 | four.one | .four | eight.9 | .9 | seven.2 | .seven | 20 | two | |||||
| 14 | 50 | six.two | .six | twenty.seven | 2.1 | 7.nine | .7 | 40.3 | four.1 | 7000 | 3000 | ≤30 | 15000 |
| eighty | nine | .nine | 27 | 2.7 | twelve.seven | one.three | 54.one | five.five | |||||
| one hundred | 9 | .9 | 32 | 3.3 | 12.seven | one.three | sixty two.1 | 6.3 | |||||
| 17 | 50 | 18.4 | one.9 | 39 | four | 29.nine | three | eighty.5 | 8.two | 6500 | 3000 | ≤30 | 15000 |
| 80 | twenty five.three | two.6 | 49.five | 5 | 31 | 3. two | a hundred.1 | 10.2 | |||||
| 100 | 27.6 | 2.8 | sixty two | six.3 | 45 | four.six | 124.2 | 12.seven | |||||
| 20 | fifty | 28.eight | two.9 | sixty four.4 | six.six | 39 | 4 | 112.seven | eleven.five | 5600 | 3000 | ≤30 | 15000 |
| 80 | 39.one | 4 | eighty five | eight.8 | 54 | five.five | 146.1 | 14.nine | |||||
| 100 | forty six | four.seven | ninety four.three | 9.6 | fifty six | five.8 | 169.one | 17. 2 | |||||
| a hundred and twenty | 46 | four.seven | 100 | 10.two | fifty six | five.eight | 169.one | seventeen.two | |||||
| one hundred sixty | forty six | four.seven | 112 | 10.9 | fifty six | 5.eight | 169.1 | seventeen. 2 | |||||
| 25 | 50 | forty four.nine | 4.six | 113 | 11.five | sixty three | six. five | 213.9 | 21.eight | 4800 | 3000 | ≤30 | 15000 |
| eighty | seventy two.five | 7.four | 158 | sixteen.1 | a hundred | ten.2 | 293.three | 29.nine | |||||
| 100 | seventy seven.1 | seven.9 | 181 | 18.four | 124 | twelve. 7 | 326.six | 33.three | |||||
| a hundred and twenty | seventy seven.one | seven.9 | 192 | 19.six | 124 | 12.seven | 349.6 | 35.6 | |||||
| 32 | fifty | 87.4 | 8.9 | 248 | twenty five.3 | 124 | 12.seven | 439 | forty four.eight | 4000 | 3000 | ≤30 | 15000 |
| eighty | a hundred thirty five.seven | 13.eight | 350 | 35.6 | 192 | 19.6 | 653 | 66.six | |||||
| a hundred | 157.6 | sixteen.one | 383 | 39.one | 248 | twenty five.3 | 744 | 75.9 | |||||
| 120 | 157.six | sixteen.one | 406 | 41.four | 248 | twenty five.3 | 789 | 80.5 | |||||
LSG Rated parameters
| Model | Reduction ratio |
Rated torque at 2000r/min enter |
Permissible peak torque at begin and end | Permissible maximum price for typical load torque | Permissible maximum momentary torque | Permissible maximum input rotational pace | Permissible average input rotational speed | Backlash | Design lifestyle | ||||
| Grease | Grease | ||||||||||||
| Nm | kgfm | Nm | kgfm | Nm | kgfm | Nm | kgfm | r/min | r/min | Arc Sec | Hour | ||
| 11 | 80 | three.eight | .4 | 8.5 | .9 | six.eight | .seven | 19.1 | 1.nine | 8000 | 3000 | <=20 | 10000 |
| 100 | four.1 | .four | 8.9 | .9 | seven.two | .seven | 20 | two | |||||
| 14 | fifty | seven | .7 | 23 | 2.3 | 9 | .9 | 46 | 4.seven | 10000 | 6500 | <=20 | 15000 |
| eighty | ten | one | thirty | 3.1 | fourteen | 1.four | sixty one | six.two | |||||
| 100 | 10 | 1 | 36 | 3.7 | fourteen | 1.4 | 70 | 7.two | |||||
| 17 | 50 | 21 | 2.1 | forty four | four.five | 34 | three.four | 91 | 9 | 7500 | 5600 | <=20 | 20000 |
| 80 | 29 | two.9 | fifty six | 5.7 | 35 | 3.six | 113 | 12 | |||||
| a hundred | 31 | three.two | 70 | seven.two | fifty one | five.2 | 143 | fifteen | |||||
| 20 | 50 | 33 | three.three | seventy three | seven.four | 44 | four.five | 127 | 13 | 7000 | 4800 | <=20 | 20000 |
| 80 | 44 | four.five | 96 | 9.8 | 61 | six.2 | a hundred sixty five | 17 | |||||
| 100 | fifty two | five.three | 107 | 10.9 | sixty four | six.5 | 191 | twenty | |||||
| one hundred twenty | 52 | five.3 | 113 | eleven.five | sixty four | 6.5 | 191 | 20 | |||||
| a hundred and sixty | fifty two | five.three | one hundred twenty | twelve.two | sixty four | 6.5 | 191 | 20 | |||||
| 25 | 50 | fifty one | five.two | 127 | thirteen | 72 | 7.three | 242 | twenty five | 5600 | 4000 | <=20 | 20000 |
| 80 | eighty two | eight.4 | 178 | eighteen | 113 | 12 | 332 | 34 | |||||
| one hundred | 87 | eight.9 | 204 | 21 | one hundred forty | 14 | 369 | 38 | |||||
| a hundred and twenty | 87 | eight.nine | 217 | 22 | a hundred and forty | fourteen | 395 | 40 | |||||
| 32 | 50 | 99 | ten | 281 | 29 | a hundred and forty | fourteen | 497 | fifty one | 5600 | 3000 | <=20 | 20000 |
| eighty | 153 | 16 | 395 | 40 | 217 | 22 | 738 | seventy five | |||||
| 100 | 178 | 18 | 433 | 44 | 281 | 29 | 841 | 86 | |||||
| one hundred twenty | 178 | 18 | 459 | 47 | 281 | 29 | 892 | 91 | |||||
Lubrication is an essential issue to enhance the effectiveness of worm equipment transmission. The worm gear motion generates a lot of warmth, which lowers performance. The electrical power delivered at a provided temperature will increase with the transmission efficiency. Appropriate lubrication minimizes friction and warmth, which boosts efficiency.
china Cheap Elhd Series Harmonic Gearbox for Industry Robots High Precision Harmonic Gear Speed Reducer Drive Compact Design Robot Joint with for Collaborative Robotics manufacturers
Product Description
LHD Series
LHD series’ flexspline with flanging extremely quick tube framework. Which can be used when round spline fastened, and the flexspline as finish output. It can also utilized to correct the flexspline, and the circular spline as stop output. The axial duration of LHD-I is shortened by 50%, LHD-III is shortened by 15%, with out changing product efficiency.
| CONTAST US |
LHD Rated parameters
| Model | Reduction ratio | Rated torque at 2000r/min enter | Permissible peak torque at begin and quit | Permissible maximum benefit for common load torque | Permissible maximum momentary torque | Permissible maximum input rotational velocity | Permissible average enter rotational pace | Backlash | Design lifestyle | ||||
| Grease | Grease | ||||||||||||
| Nm | kgfm | Nm | kgfm | Nm | kgfm | Nm | kgfm | r/min | r/min | Arc Sec | Hour | ||
| 14 | fifty | three.7 | .38 | twelve | one.two | four.eight | .forty nine | 24 | 2.four | 8500 | 3500 | <=20 | 7000 |
| eighty | 4.2 | .43 | sixteen | 1.6 | five.nine | .six | 31 | three.one | |||||
| one hundred | five.4 | .55 | 19 | one.nine | seven.seven | .seventy nine | 35 | three.6 | |||||
| 17 | fifty | 11 | one.1 | 23 | two.3 | eighteen | one.9 | 48 | four.9 | 7300 | 3500 | <=20 | 10000 |
| eighty | fourteen | one.four | 30 | .3 | 21 | 2.one | 58 | 5.nine | |||||
| a hundred | sixteen | one.6 | 37 | 3.eight | 27 | 2.eight | 71 | 7.2 | |||||
| 20 | fifty | seventeen | one.seven | 39 | four | 24 | two.four | sixty nine | seven | 6500 | 3500 | <=20 | 10000 |
| 80 | 21 | two.1 | 46 | four.seven | 30 | three.one | 81 | .8 | |||||
| one hundred | 28 | 2.9 | 57 | 5.eight | 34 | three.5 | ninety five | nine.7 | |||||
The equipment ratio of the worm gear established is decided by dividing the amount of tooth of the equipment by the amount of threads. Therefore, solitary thread yields greater ratios than multithreading. All ep worm gear bushings have still left or proper thread. ep worm gear sets are accessible in solitary, double, triple and quadruple threads.